|
李果1,张培昌1,余达太1,毋茂盛1,2
(1.北京科技大学信息学院,北京100083;2.河南师范大学计算机系,河南新乡453002)
摘要:如何改善燃料电池的输出性能是燃料电池电动车的一个重要问题。首先燃料电池是一个多变量复杂系统。燃料电池的工作和环境温度、流量及湿度对燃料电池实际功率输出有重大影响。然后提出一种自适应模糊复合控制算法。考虑到燃料电池的多动态特性,加入自整因子层对量化因子和比例因子进行在线修改,从而改善了控制器的静态和动态特性。有实验结果证明所提出算法的有效性。最后,详细设计燃料电池电动车的能量控制系统。
1引言(Introduction)
目前电动车的电源主要是铅酸蓄电池,由于能量/重量的性能比低,不能满足电动车的要求,阻碍了电动车的发展。燃料电池(fuelcell)具有环保、结构紧凑、重量轻、电流密度高、工作温度低、启动速度快,使用无毒性的固态电解质膜等优点,在航天、航空、航海以及电动机车等各个方面有着巨大的应用潜力。燃料电池是一种发电装置。它能将储存在燃料(H2)和氧化剂(O2)中的化学能转变成电能,只要不断地供给燃料和氧化剂,它就可以不断地输出电能。
实验证明,燃料电池是一个多输入、多变量非线性变参数的纯滞后复杂系统。受许多不确定因素和非线性因素的影响,燃料电池本身的输出特性一般不好。当输出电流较大时,输出电压下降较大,表明带负载能力较差,输出功率不稳定。影响燃料电池性能的主要因素有质子交换膜的特性,膜电极装配的结构,水和热的处理方法,催化剂(Pt)的含量,杂质(CO,CO2)的浓度等。对于成品电池而言,通过调节燃料和氧化剂H2和O2的流量以及电解质膜的湿度,可以改善PEMFC的输出性能,提高实际输出功率。
现在许多燃料电池的控制手段还没有实现自动调节,没有根据输出功率的要求适时调节H2和O2的流量,这样无疑造成燃料的浪费和损耗。而电解质膜的加湿也是人工操作进行,难以保证适时调节。燃料电池是一个多变量复杂系统,许多不确定因素都会对燃料电池的电功率输出造成影响,建立准确的数学模型十分困难,由于人工操作经验和模糊控制规则都有限,用简单模糊控制器无法进行良好控制。
为此本文在文工作基础上,提出一种自适应模糊复合控制算法,它可以适时调节燃料电池的燃料物和氧化剂(H2)和(O2)的流量以及电解质膜的湿度,能够达到改善燃料电池的输出性能,减小燃料消耗,提高输出功率的目的。
有实验结果证明此种方法的有效性。最后详细设计燃料电池电动车的能量控制系统。
2燃料电池控制系统(Control system for the fuel-cell)
燃料电池控制系统的组成见图1所示。它是由自适应模糊复合控制器,伺服阀,加湿器和传感器等组成。从图1中可看出系统输出量是电功率P,输入控制量为H2的流量Q1,O2的流量Q2和电解质膜湿度H。控制H2流量Q1的模糊控制器1的双输入分别是电功率误差e和氧气流量Q2。控制O2流量Q2的模糊控制器2的双输入分别是电功率误差e和氢气流量Q1。控制H2湿度的模糊控制器3的双输入分别是电功率误差e和误差变化率˙e。在模糊控制中,输入变量的模糊化,控制规则的形成及模糊判决都需要人工操作的经验。设计完成后,还需要在运行中进行调整。
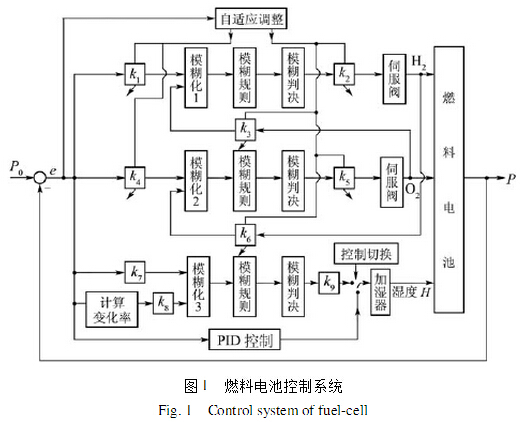
考虑到量化因子和比例因子对系统的动态特性和稳态特性影响极大,控制系统加入自适应调整模块,可以适时调节量化因子和比例因子,提高系统动稳态特性,减小燃料消耗。特别是在小误差范围内,控制系统还对湿度实行PID控制,通过精确调节湿度,实现燃料电池输出功率的精确控制。
3燃料电池复合控制器(Combined controller of the fuel-cell)
3.1模糊控制器(Fuzzy logic controller)
常规模糊控制器,详见文献。
3.2自适应调整(Self-adjusting parameter)
通常模糊控制器中量化因子、比例因子是固定的。而实际上,要使系统达到良好的动稳态特性,同时做到燃料消耗尽可能小,单凭固定的量化因子、比例因子很难达到要求。因此,应根据误差、误差变化率对量化因子、比例因子进行在线调整。考虑到量化因子、比例因子的变化趋势正好相反,可取量化因子变化倍数与比例因子变化倍数互为倒数,设量化因子变化倍数为N,则
1)IF(e=正大and˙e=正大)THENN=正小。表示当误差e和误差变化率˙e较大时,控制系统主要是减少误差,加快动态过程,应取较大控制量,比例因子要大,量化因子要减小。
2)IF(e=正小and˙e=正小)THENN=正大。表示当误差e和误差变化率˙e较小时,系统将接近稳态值,应放大量化因子,同时减小比例因子,减小控制量。实际中将所有规则离线模糊推理计算,得出因子自适应调整表,供在线查询。
3.3复合控制(Combined controller)
用控制切换指标协调两种控制器之间的切换,使两种控制器在不同范围内发挥优势。在误差和误差变化率都较小的情况下,发挥PID控制的稳态特性好,控制精度高的优势。在误差较大的情况下,发挥模糊控制器快速性和抗干扰能力强的优势。其中切换指标性能将直接影响到复合控制器能否做到无扰切换。切换指标设计为Ce|e|+Cc|˙e|。
其中Ce+Cc=1,具体数据由实验确定。当这个切换指标大于等于选定的门限值时,切换到模糊控制器。小于门限值时切换到PID控制器。切换指标不仅考虑误差大小,还考虑误差变化率,这有利于切换时控制器的控制平稳过渡。
4燃料电池控制实验结果(Experimental re-sults for the fuel-cell)
试验场地在通风良好的宽大实验室内进行。氢气由高纯度液氢气瓶提供,氧气是由风机加压后吹出的空气提供。加湿器只对氢气进行加湿。燃料电池的最大输出功率为1200W。燃料电池的电负载是可变电阻箱。考经过反复大量的调试实验,得到实验控制参数k1,k2,k3,k4,k5,k6,k7,k8,k9的基本值为0.86,0.67,0.63,0.9,0.49,0.8,0.74,0.89,0.91。PID控制器比例、微分、积分参数取为3.76,0.35,0.68。切换指标Ce=0.62,Cc=0.38。控制器切换门限值选取为稳态值的20%。图2给出自适应复合控制器控制燃料电池输出功率的响应特性曲线。系统开始工作在400W。在t=5s时,提高输出功率给定值P0=1000W。控制系统调节H2的流量、O2的流量和电解质膜的湿度。大约在5s时间后,燃料电池输出功率达到P0=1000W,没有稳态误差。而用一般的模糊控制器控制响应曲线(见虚线),经过5s后趋于稳态,但有稳态误差。另外,与一般的模糊控制器进行比较,控制系统的燃料消耗量平均减少7%。

5电动车能源控制系统(Energy control sys-tem of electric vehicles)
燃料电池电动车采用混合动力系统结构,即由燃料电池和铅酸蓄电池构成混合动力系统,两个燃料电池堆的功率共为2.4kW。控制系统的组成如图3所示。两个燃料电池串联后输出电压60V~150V,输出并连接两个DC/DC,其中DC/DC2输出28V的直流电,用于为燃料电池控制器提供电源,DC/DC1实际上是一个稳压限流器,其输出和铅酸电池并联后一起接至DC/AC逆变器,一般电源的输出是不允许并联的,但该DC/DC1的内部输出电路中串联有二极管,保证铅酸电池的电流不会通过DC/DC1流入燃料电池。DC/DC1的设计输入为55V~150V,输出为50V,静态情况下,当铅酸电池电量不足时,即输出电压低于50V时,燃料电池可通过DC/DC1为铅酸电池充电。由于大电流充电时会造成铅酸电池发热,为了保护铅酸电池,DC/DC1进行了特殊的设计,其输出电压可自动跟随铅酸电池的电压,输出电流被限定最大为15A。当车在行进过程中时,由于突然的加速或上坡路况等发生,铅酸电池的电压一般都在0V~50V之间连续变动,这时燃料电池和铅酸电池一起向逆变器供电,进而带动三相异步电动机转动。
5.1软件(Software)
软件功能是利用CPU的定时器来定时执行各种动作,除了实现燃料电池的自适应模糊复合控制算法外,还要随时判断铅酸蓄电池的电压、燃料电池的电压、电流、温度、空气湿度、氢气压力的大小是否在许可范围内,不在则让液晶显示红色并报警,液晶及时显示数据的变化和工作状态。
1)温度监测部分。
燃料电池的工作温度范围在(40℃~75℃)为最好。通常必须在0℃以上,在5℃以下就在液晶上显示红字并报警关掉氢气的进气阀。热敏电阻不可能放在燃料电池质子交换膜的地方测出它的反应堆的温度,故有一个偏移量,这里取在燃料电池的外端测出超过60℃则报警关阀。在工作范围外采用调节控温风机的输入电压来改变温度。
2)湿度监测部分。
由于燃料电池的工作环境要在空气湿度达20%以上,故在20%以下要报警并关掉氢气进气阀,从而让燃料电池停止工作。
3)其他部分。
为保护燃料电池,其输出电压不能低于60V,电流不能高于15A;铅酸电池的电压如果低于40V的话在液晶显示红字报警提示需要充电。氢气压力如果低于1Mpa,同样显示红字报警。

5.2硬件(Hardware)
硬件电路从功能上可分为7个部分,即主CPU、模拟信号采集模块A/D、D/A控制与执行单元、电源模块、人–机接口模块、通信模块以及存储器扩展等其他电路接口,其工作原理:以AT89C55WD为主CPU,利用两片ADC0809模数转换芯片采集温度、湿度、氢气压力和流量,燃料电池的电压、电流、铅酸电池的电压等共16路模拟量,并用DAC7625为数模转换芯片并通过功率管OPA548来驱动空气风机、伺服阀和电加湿器。同时,通过并口将数据送往液晶显示。另外还有其他的管脚控制电磁阀、报警器,键盘芯片74C922按键显示所需页面,时钟芯片DS12287来显示时间等。其中:
1)A/D数据采集模块。
采用三级放大模拟电路对由温湿度传感器采集到的电信号进行放大,由于第1级的信号是mV级,而由燃料电池经过DC/DC转换后的波纹幅度都达到100mV,这大大影响温度测量的准确性和稳定性,采用直流电源给模拟电路的反相放大器LM741提供电压解决了这一问题;对于流量、电流传感器、氢气压力传感器产生的电信号通过INA118反相放大器来放大;至于燃料电池的电压和铅酸电池的电压可直接通过变阻器组成的比例器分压和稳压管得到;最后把16路模拟信号(0V~5V)送往A/D转换芯片处理。
2)D/A控制执行模块。
先采用D/A转换芯片将CPU传出的数字信号转换为相应的模拟信号(0V~5V),然后通过LM741反向放大器放大后(0V~28V)送往功率管OPA548来驱动空气风机、氢气伺服阀和电加湿器。键盘部分通过一个CPU管脚来控制键盘芯片的使能端,通过查询方式来判断键盘是否有键按下;报警部分也是通过一个管脚直接控制蜂鸣器的开或关;另外还有管脚接收电动机过来的信号判断电动车是停车还是正常行驶。
燃料电池能量控制系统应用到高尔夫电动车上。经实验验证完全有效。当电动车正常行走时,燃料电池和铅酸蓄电池一起向外供电。当铅酸蓄电池输出电压低于要求值时,电动车停车,由燃料电池向铅酸蓄电池充电。当一起向外供电时,经实测,在额定工作条件下燃料电池输出电流与铅酸电池的输出电流之比大约是1:3。与铅酸蓄电池动力系统相比,混合动力系统驱动电动车持续航行里程平均提高22%。
6结论(Conclusion)
本文设计电动车燃料电池控制系统。当工作环境条件和负载发生变化时,电动车燃料电池控制系统都能够适时调节,用相对较小的燃料消耗,实现燃料电池良好的输出性能,满足电动车对电源输出功率的要求。下一步研究方向是在加深对燃料电池机理的深刻认识基础上,进一步改善燃料电池的输出性能,提高输出功率控制精度。 |